Smart Robot Calibration
Performs the calibration between camera and robot automatically.
-
Manage the coordinates of camera and robot pairs
-
Automatic calibration with at least 4 coordinate pairs
-
Output of the calibration error (RMS)
-
Saving the calibration for all programmes
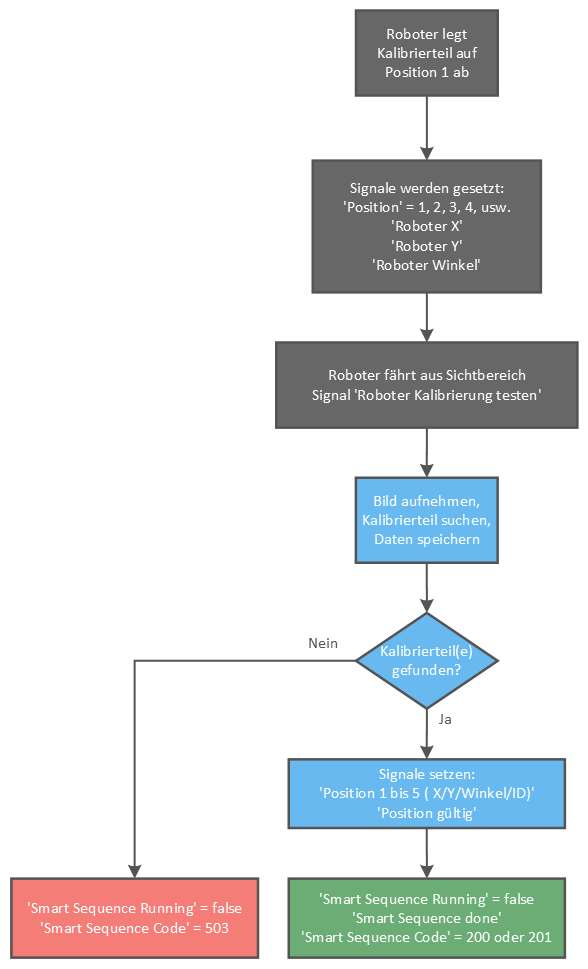
Functional principle
This sequence consists of several steps:
-
Robot places the calibration part in the desired position
-
Calibration part is recognised with camera
-
Robot (X/Y) and camera (X/Y) coordinates are saved for the selected position
-
At position 1, the old saved coordinate pairs are reset
-
If at least 4 coordinate pairs are available, the calibration is performed automatically
-
Calibration error (RMS) and calibration IO/NIO are output on the interface
-
Information: The rotation is not used for calibration. The calibration part should therefore always be placed in the trained angle position.
Information: Each coordinate must be transferred in millimetres (mm). At position 1, all stored pairs of points are deleted. Calibration is carried out from 4 positions and the Rms error is output.