Benutzeroberfläche
Das Benutzeroberfläche der EasyFeeder Station teilt sich in mehrere Bereiche ein:
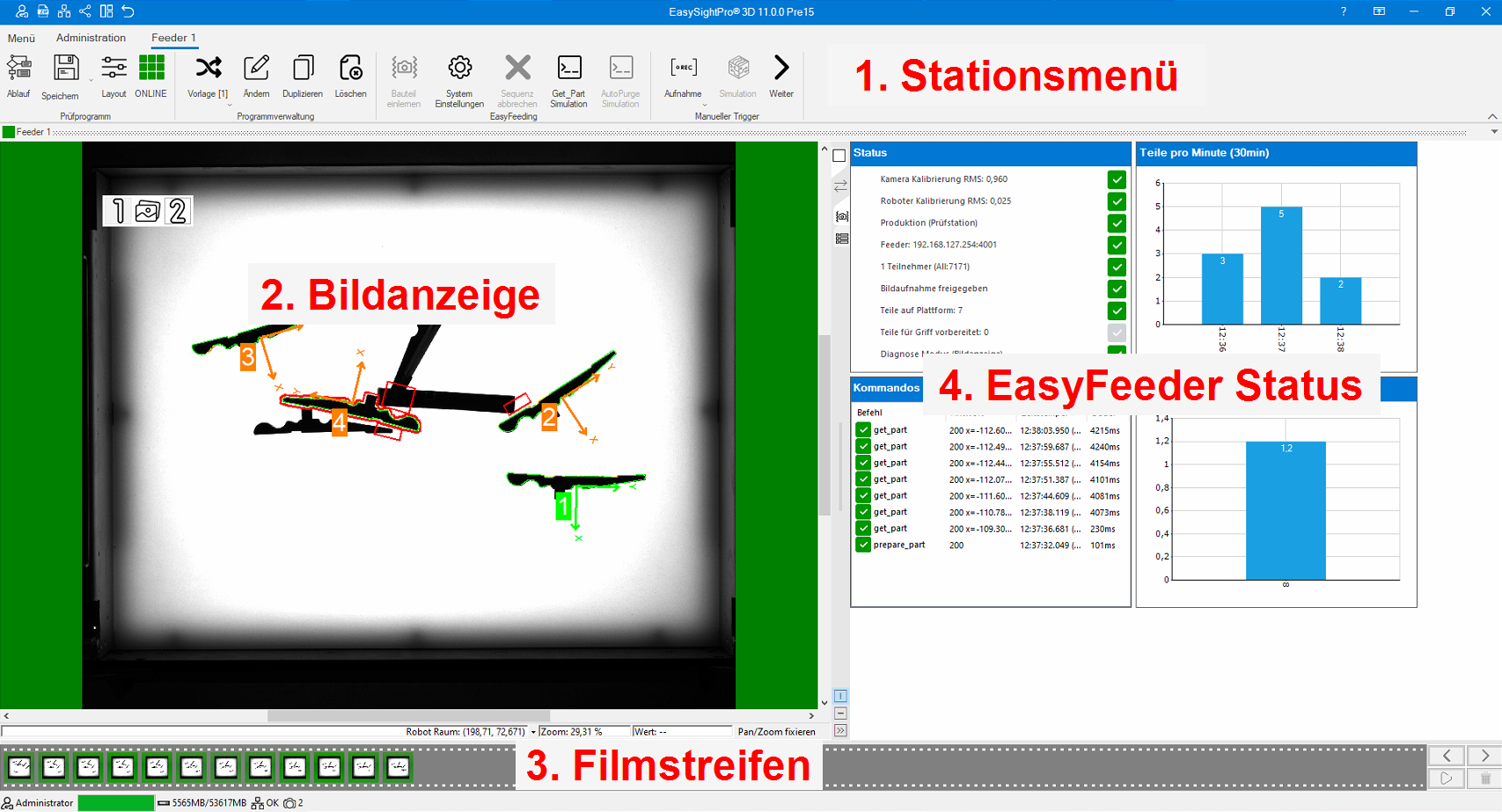 |
1. Stationsmenü | Pro Station ist ein eigener Menüreiter mit den entsprechenden Einträgen sichtbar. Diese dienen zur Steuerung und Parametrierung der Prüfstation. |
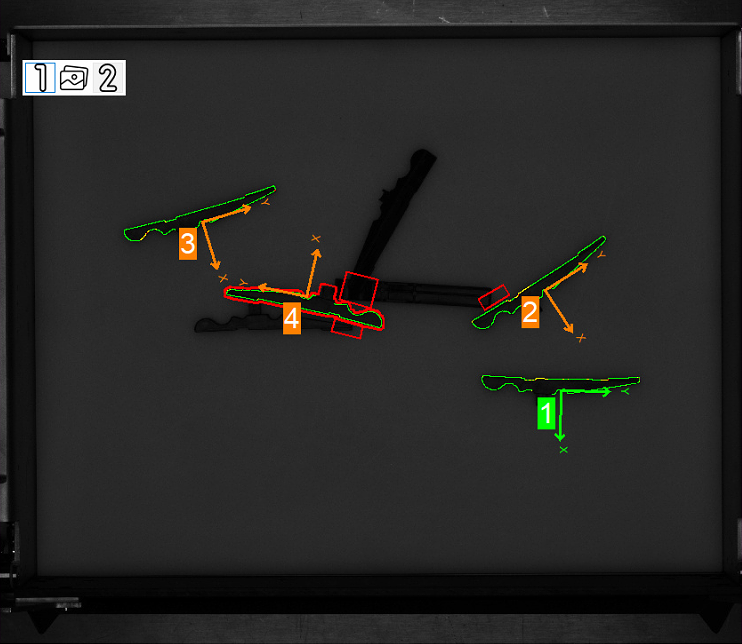
| 2. Bildanzeige | Zeigt das aktuelle Bild mit seinen Overlays an. | |
| 3. Filmstreifen | Ermöglicht den Zugriff auf die letzten aufgenommenen Kamerabilder. Dies ist für Diagnosezwecke sehr hilfreich. | |
| 4. EasyFeeder Status | Der Status Bereich zeigt die aktuellen Infos der Station und bietet Zugriffsmöglichkeiten auf Parameter mittels EasyTabelle. |
Pro Feeder Station gibt es im Menü einen eigenen Reiter mit dazugehörigem Menü:
Aktives Programm
In diesem Panel sind alle Funktionen für die Interaktion mit dem geladenen Prüfprogramm integriert.
| Name | Beschreibung | ||
|---|---|---|---|

|
Ablauf |
Hinweis: Im EasyFeeder Betrieb ist dieser Punkt aus Sicherheitsgründen gesperrt, da alle Änderungen automatisch durch den 'Bauteil einlernen' Wizard durchgeführt werden. |
|

|
Speichern |
Speichert Änderungen am aktuellen Prüfprogramm. Per Pfeil rechts neben dem Symbol lässt sich ein Untermenü mit zusätzlichen Funktionen öffnen. Hinweis: Alle Änderungen in 'Bauteil einlernen', werden beim Beenden des Wizards automatisch gespeichert. |
|

|
Kennzeichen ablöschen | Mit dieser Option wird die interne Kennzeichnung für das nicht gespeicherte Programm zurückgesetzt. | |

|
Startprogramm aktivieren | Aktiviert das aktuelle Programm als Startprogramm. Damit wird dieses beim nächsten Systemstart automatisch aktiviert. | |

|
Bauteil zurücksetzen | Setzt das Bauteiltraining zurück. Diese Option ist nach dem Duplizieren einen Programmes hilfreich. | |

|
Kalibrierung zurücksetzen | Setzt die systemweite Kalibrierung zurück. | |

|
Speichern |
Zeigt an, dass das Prüfprogramm Änderungen enthält, die noch nicht gespeichert wurden. In diesem Zustand ist ein Prüfprogrammwechsel von extern (SPS, Roboter) nicht möglich. |
|

|
Layout | In den Layout Einstellungen lässt sich das Erscheinungsbild der Stationsanzeige verändern. | |

|
Offline | Zeigt an, dass die Station Offline ist. Mit Klick auf diesen Punkt, wird versucht die Station Online zu schalten. | |

|
Online | Zeigt an, dass die Station Online ist. Mit Klick auf diesen Punkt, wird versucht die Station Offline zu schalten. | |
Programmverwaltung
In diesem Panel sind alle Funktionen zum Verwalten der Prüfprogramme integriert.
| Name | Beschreibung | |
|---|---|---|

|
Programmwechsel | Bietet eine Liste alle Prüfprogramme und ermöglicht das manuelle Wechseln des aktiven Programmes. |

|
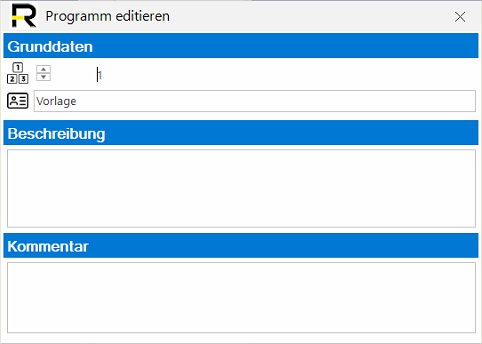
Ändern | Ermöglicht die Änderung der Programmdaten wie Nummer, Name, Beschreibung und Kommentar. |

|
Duplizieren | Dupliziert das aktuelle Prüfprogramm und wählt dieses automatisch an. |

|
Löschen | Löscht das aktuelle Prüfprogramm. |
Bestehenden Programm ändern:
EasyFeeding
In diesem Panel finden sich alle EasyFeeder Funktionen und Zugriffe.
| Name | Beschreibung | |
|---|---|---|

|
Bauteil einlernen | Öffnet den Wizard für das Training: Kamera, Roboter-Kalibrierung, Bauteil, Feeder |

|
Systemeinstellungen | Öffnet das Parameter Fenster für die EasyFeeder spezifischen Einstellungen. |

|
Sequenz abbrechen | Wenn dieser Punkt aktiv ist, ist eine Smart Sequenz aktiv und kann abgebrochen werden. |

|
Get_Part Simulation | Bringt einen 'Get part' Befehl in den TCP Server ein. Damit wird der komplette 'Smart Part Detection' Ablauf ausgeführt. |
|
|
AutoPurge Simulation | Bring einen 'AutoPurge' Befehl in den TCP Server ein. Damit wird der komplette 'Smart Purge' Ablauf ausgeführt. |
Manueller Trigger
In diesem Panel finden sich der TestRun, die manuelle Bildaufnahme mittels Reporting und die Simulation dieser.
| Name | Beschreibung | |
|---|---|---|

|
Aufnahme gestoppt | Die temporäre Aufnahme der Daten mittels Reporting ist deaktiviert. |

|
Aufnahme aktiv | Aktiviert die temporäre Aufnahme von Daten mittels Reporting für die nächsten 100 Bilder. |

|
Simulation | Startet/Stoppt die Simulation von Prüfungen mittels Reporting Datensätzen. |

|
TestRun | Öffnet das TestRun Fenster. Mittels TestRun kann die Qualität des Prüfprogrammes mittels IO/NIO Datenbank abgesichert werden. |

|
Zurück | Diese Option ist nur während der Simulation aktiv und ermöglicht das zurück schalten auf den vorherigen Datensatz. |

|
Weiter | Im Kamerabetrieb (Aufnahme per Software muss in Kamera aktiv sein) wird manuell ein Bild aufgenommen und ausgewertet. Bei aktiver Simulation wird auf den nächsten Datensatz geschalten. |
Zeigt das Bild zum aktuellen Datensatz an. Sind mehre Bilder verfügbar, dann können diese über den eingeblendeten Selektor durchgeschlaten werden.

Hinweis: Sollte sich die Bildanzeige nicht mehr aktualisieren, prüfen Sie ob diese mit dem Filmstrreifen gestoppt wurde. Mit  können Sie die Anzeige wieder Freigeben.
können Sie die Anzeige wieder Freigeben.
Mit dem FIlmstreifen halten Sie Zugriff auf die letzten aufgenommenen Bilder und können diese durchschlaten, sperren, speichern und löschen:
| Funktion | Beschreibung | |
|---|---|---|

|
Ergebnis löschen | Löscht den ausgewählten Datensatz aus dem Filmstreifen. |

|
Ergebnis sperren | Sperrt den ausgewählten Datensatz im Filmstreifen und schützt diesen vor Löschung. |

|
Sperre aufheben | Hebt die Sperredes ausgewählten Datensatzes auf. |
|
|
Alle Sperren aufheben | Hebt die Sperre aller Datensätze auf. |

|
Ergebnis speichern | Speichert den ausgewählten Datensatz per Reporting auf die Festplatte ab. |
|
|
Alle Ergebnisse speichern | Speichert alle Datensätze im Filmstreifen per Reporting auf die Festplatte ab. |
Wichtig: Sobald ein Eintrag im Filmstreifen ausgewählt wird, ist der Filmstreifen pausiert und wird nicht mehr aktualisiert. Im Hintergrund läuft die Auswertung weiter und sobald die Puase mit aufgehoben wird, werden die fehlenden Datensätze in den Filmstreifen hinzugefügt.
Beispiel Video:
Im Status ist der aktuelle Betriebszustand des Feeders zu sehen, dieser gliedert sich in 4 Bereiche:

Status
Zeigt den aktuellen Betriebszustand des Feeders:
| Status | Beschreibung |
|---|---|
| Kamera Kalibrierung | Zeigt den Status der Kamera Kalibrierung und den aktuellem Rms Fehler an. |
| Roboter Kalibrierung | Zeigt den Status der Roboter Kalibrierung und den aktuellem Rms Fehler an. |
| Produktion (Prüfstation) | Zeigt an, ob das System im Produktion Modus ist. Produktion = Programm geladen und Station Aktiv (Online) |
| Feeder | Zeigt die Verbindung zum Feeder an. Befindet sich der Feeder im Alarm Zustand (z.B. fehlende Sicherheitsspannung), dann ist das hier zu sehen. |
| Teilnehmer | Zeigt die Anzahl an verbundenen TCP/IP Teilnehmer für die TCP/IP Kommunikation an. Bei den Asyril Roboter Plugins werden per Default zwei Verbindungen aufgebaut. |
| Bildaufnahme freigegeben | Zeigt an, ob die Bild Aufnahme per Schnittstelle wurde oder freigegeben ist. |
| Teile auf Plattform | Zeigt die ungefähre Anzahl an Teilen aus der Smart Part Detection an. Diese Anzahl wird für die Zuförderung per Bunker verwendet. |
| Teile für Griff vorbereitet | Zeigt die Anzahl an griffbereiten Teilen an, die mit 'Get part' abgeholt werden können. |
| Diagnose Modus (Bildanzeige) | Hier kann der Diagnose Modus für die Bildanzeige aktiviert oder deaktiviert werden. Im Diagnose Modus sind mehr Informationen zu nicht greifbaren Teilen zu sehen. |
Kommandos
Zeigt die Liste der letzten 10 eingegangenen TCP/IP Kommandos an. Diese Liste wird bei aktiver Feldbus Kommunikation nicht befüllt.
Neue Kommandos werden mit  angezeigt, sobald diese vom TCP Server angenommen wurden. Nachdem das Kommando abgearbeitet wurde, wird die Antwort eingefügt und das Kommando mit
angezeigt, sobald diese vom TCP Server angenommen wurden. Nachdem das Kommando abgearbeitet wurde, wird die Antwort eingefügt und das Kommando mit  als beendet markiert.
als beendet markiert.
Teile pro Minute
Diese Statistik zeigt die Anzahl an gegriffenen Teile pro Minute über die letzten 30 Minuten an. Die Daten werden aktualisiert, sobald ein neues Teil mit 'Get part' angefordert wurde.
Greifbare Teile vs. Teile auf Plattform
Diese Statistik zeigt das Verhältnis von greifbaren Teilen zu Teilen auf der Plattform an.
Diese Information kann beim Optimieren des Parameters 'Optimalen Teile auf Plattform' hilfreich sein.