Roboter kalibrieren
Ziel der Hand-Eye Kalibrierung ist es, die X und Y Koordinaten der erkannten Teile vom Kamera-Koordinatensystem in das Roboterkoordinatensystem zu überführen. Dank der Kalibrierung wird das Roboter-Koordinatensystem direkt in die EasyFeeder Station übernommen und alle Koordinaten in Roboter-Koordinaten ausgegeben.
Hinweis: Die Roboter Kalibrierung wird global durchgeführt und gilt für alle Prüfprogramme!
Wichtig: Das Koordinatensystem des Roboters muss mit der Ebene der Oberfläche der Asycube-Platte abgeglichen sein.
Hinweis: Die reproduzierbare Positionierung Kalibrierteil ist wichtig für die Qualität der Kalibrierung!
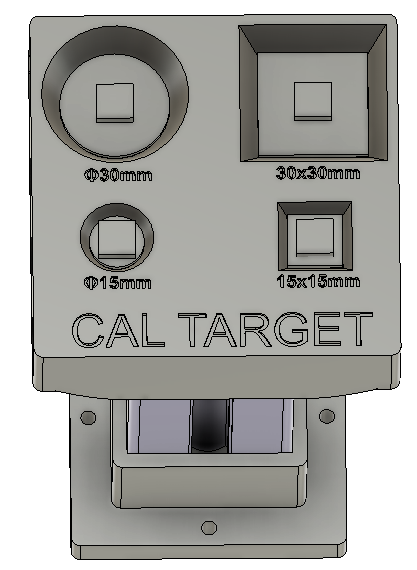
Verwenden Sie für die Kalibrierung ein Teil mit möglichst einfachen Konturen (Rechteck, Quadrat, Kreis), da Produktiv-Teile oft für die Kalibrierung nicht optimal sind.
-
Einfachen Konturen (Rechteck, Quadrat, Kreis).
-
Höhe sollte der Dicke des zu greifenden Teiles entsprechen.
-
Das Kalibrierteil muss reproduzierbar greifbar sein. Idealerweise sollte sich das Kalibrierteil im Greifer zentrieren.
-
Das Kalibrierteil darf beim Ablegen nicht verrutschen, da dies würde die Qualität der Kalibrierung verschlechtert.
-
Sollte die Kalibrierung mit einem eigenen Greifer durchgeführt werden, dann beachten Sie die eventuellen Unterschiede im TCP der Greifer
Beispiele:
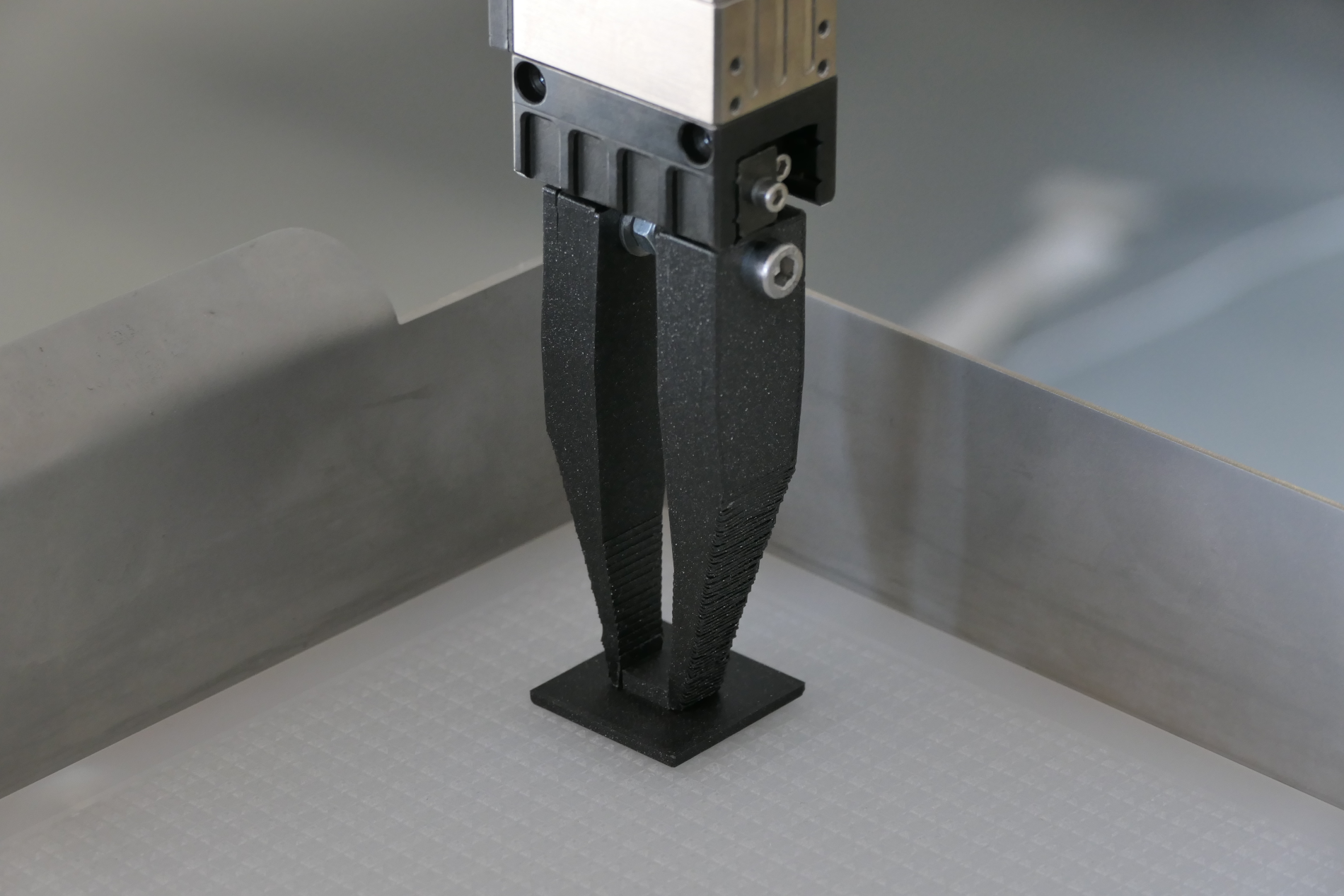
Das Koordinatensystem des Werkzeugs wird auf dem Werkzeug-Mittelpunkt (TCP) positioniert. Die TCP-Position entspricht der Position, an der Sie das Bauteil greifen wollen:
-
Fingergreifer: Positionierung des TCP an der Stelle, an welcher der Greifer das Teil greifen wird
-
Vakuumgreifer: Positionierung des TCP am Ende des Greifers.
Menü
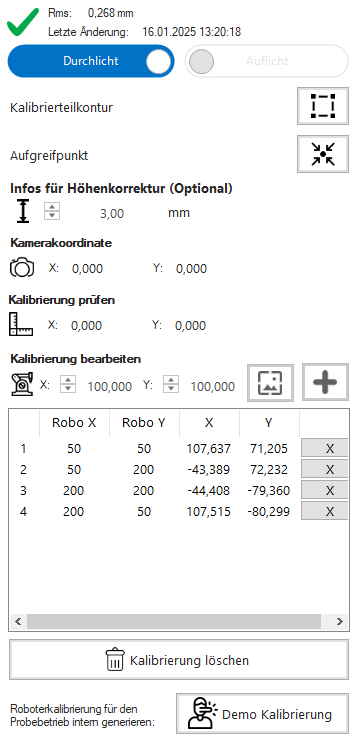
Hinweis: Falls zum Inbetriebnahmezeitpunkt noch kein Roboter verfügbar ist, dann kann der Roboter mittels "Demo Kalibrierung"  übersprungen werden. Dabei werden 4 simulierte Koordinatenpaare in die Kalibrierung eingefügt, um die Kalibrierung zu simulieren. Damit ist das Bauteil-Training und die Feeder-Einrichtung ohne Roboter möglich.
übersprungen werden. Dabei werden 4 simulierte Koordinatenpaare in die Kalibrierung eingefügt, um die Kalibrierung zu simulieren. Damit ist das Bauteil-Training und die Feeder-Einrichtung ohne Roboter möglich.
Wichtig: Die "Demo Kalibrierung" ist kein Ersatz für die Kalibrierung mit dem Roboter. Die Roboterkalibrierung ist zwingend für die Produktivbetrieb notwendig.
Kalibrierteilkontur einlernen
-
Legen Sie das Kalibrierteil mit dem Roboter mittig auf die Feeder Fläche ab.
Hinweis: Beachten Sie, dass das der Winkel des Bauteils bei der Kalibrierung immer 0° sein sollte, da die Kalibrierung nur mit X und Y Koordinaten arbeitet.
-
Nehmen Sie mit
 ein neues Bild auf.
ein neues Bild auf. -
Mit
 kann die Kontur des Kalibrierteil trainiert und der Suchbereich eingerichtet werden.
kann die Kontur des Kalibrierteil trainiert und der Suchbereich eingerichtet werden.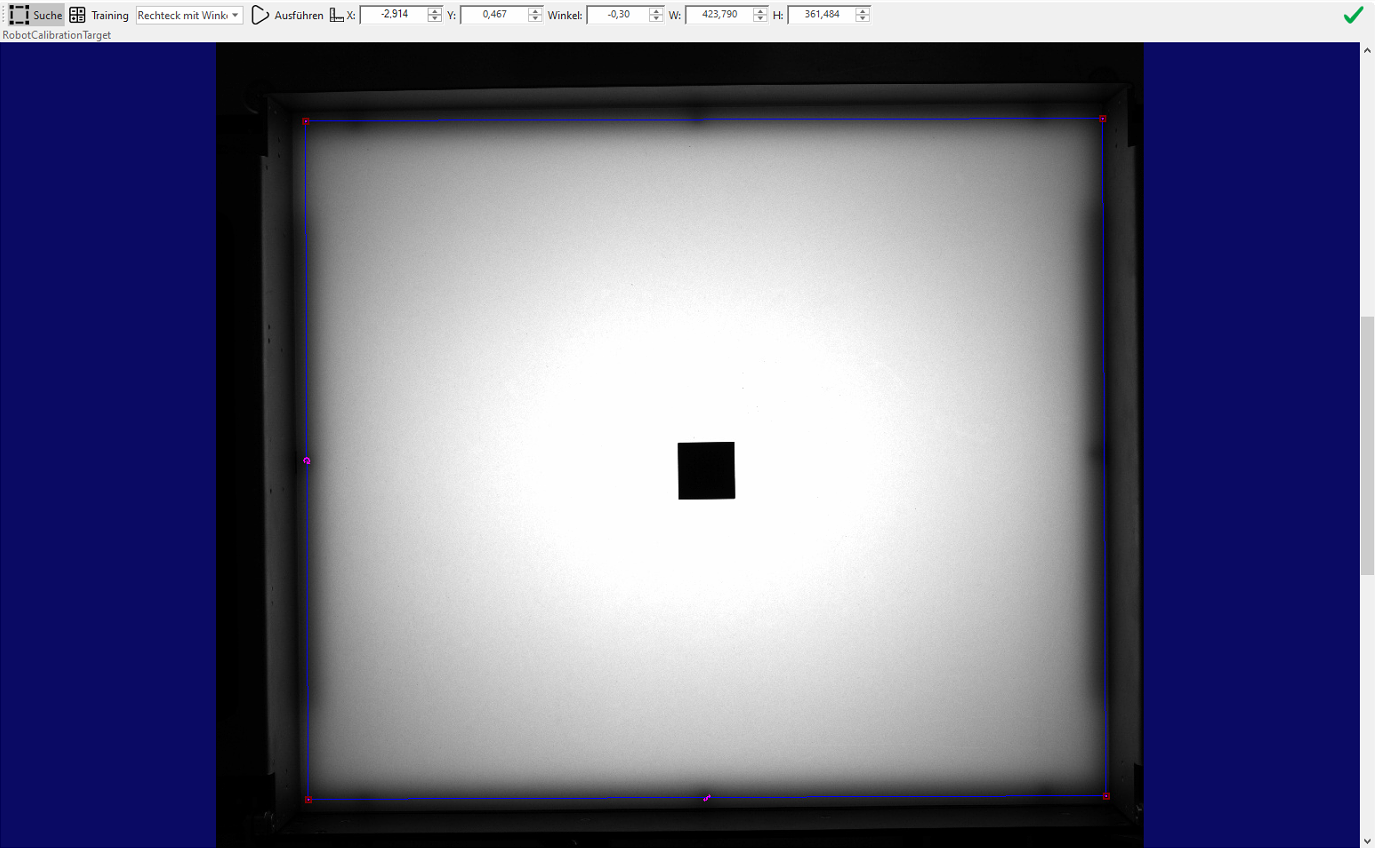
-
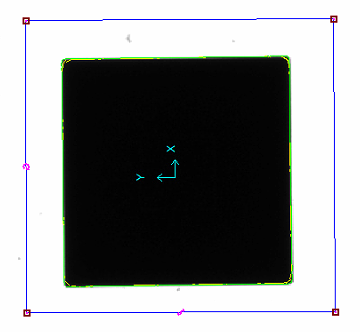
Unter Suche
wird der Suchbereich für die Kalibrierung definiert. In diesem Bereich wird während dem Kalibriervorgang nach dem Bauteil gesucht. -
Unter Training
 wird das Kalibrierteil eingelernt
wird das Kalibrierteil eingelernt-
Den Suchbereich möglichst eng um das Bauteil
-
Zentrieren Sie den Mittelpunkt mit "Im Fenster zentrieren"

-
Mit "Ausführen"
 wird der Trainingsvorgang durchgeführt und die trainierten Konturen werden im Bild angezeigt.
wird der Trainingsvorgang durchgeführt und die trainierten Konturen werden im Bild angezeigt.
-
-
Das Kontur-Training kann mit
 beendet werden.
beendet werden. -
Nehmen Sie mit
ein neues Bild auf und kontrollieren Sie die Erkennung.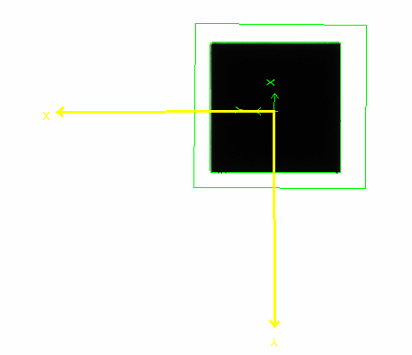
-
Falls der angezeigte Aufgreifpunkt mit dem Roboter nicht übereinstimmt, dann kann dieser per "Aufgreifpunkt ändern"
 verschoben werden
verschoben werden -
Sollte die Höhenkorrektur für Bauteile verwendet werden, dann ist zusätzlich die Höhe
 des Kalibrierteiles in Millimeter einzutragen.
des Kalibrierteiles in Millimeter einzutragen.
Optionale Schritte bei Verwendung der Höhenkorrektur
Hinweis: Sollte das Kreuz der Bauteilerkennung nicht 1:1 mit dem Roboter-Punkt übereinstimmen, dann wird dies in einem der nächtens Schritte bei der Aufgreifpunkt-Berechnung berücksichtigt.
Vorgehensweise bei (manueller) Kalibrierung
Die Kalibrierung kann manuell per Wizard oder über die Kommunikationsschnittstellen (TCP/IP oder Feldbus) erfolgen.
Die Kalibrierung muss min mindesten 4 Punkten erfolgen, die möglichst weit auseinander liegen. Je mehr Punkte verwendet werden, desto besser ist die Qualität der Kalibrierung.
-
Bestehende Kalibrierung löschen

Diese Schritte müssen für jeden Kalibrierpunkt durchgeführt werden:
-
Kalibrierteil mit dem Roboter neu aufnehmen
-
Kalibrierteil am Feeder ablegen
-
Achten Sie auf genügend Abstand zum Rand und vermeiden Sie jegliche Berührung
-
Legen das Bauteil immer im trainierten Winkel ab
-
Achten Sie darauf, dass das Bauteil beim Ablegen nicht verrutscht
-
-
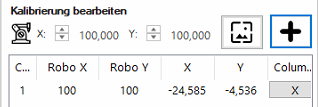
Ablage Koordinaten bei "Kalibrierung bearbeiten"
 eintragen
eintragen
-
Roboter auf Kamerablickfeld fahren
-
Neues Bild aufnehmen
-
Erkennung kontrollieren. Kamera Symbol
 sollte grün hinterlegt sein.
sollte grün hinterlegt sein.
-
Roboter-/Kamerakoordinaten-Paar in die Liste hinzufügen

-
Diesen Vorgang für mindesten 4 Punkte wiederholen.
Hinweis: Ab dem vierten Punkt wird die Kalibrierung berechnet und gespeichert, sofern diese gültig ist. Je niedriger der angezeigte RMS- Fehler (Einheit: Millimeter), desto besser ist die Qualität der Kalibrierung.
Wichtig: Sollte der maximale RMS-Fehler überschritten werden, gibt es einen Unterschied zwischen den Roboter- und Kamerakoordinaten. In einem solchen Fall wird empfohlen die Kalibrierung zu löschen und neu durchzuführen.