Smart Calibration Test
Testet die Roboterkalibrierung, indem das Kalibrierteil an einer beliebigen Position abgelegt und vom Kamerasystem erkannt wird. Die Abweichung zwischen Ablageposition und erkannte Position sollte möglichst gering sein.
-
Erkennen des Kalibrierteil auf der Platform
-
Ausgabe der Koordinaten
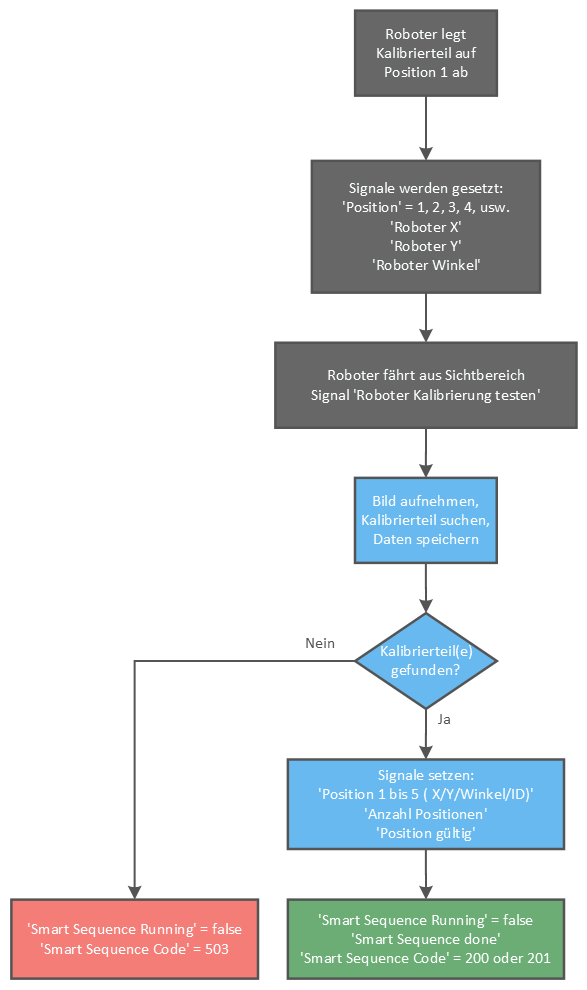
Funktionsprinzip
Diese Sequenz besteht aus mehreren Schritten:
-
Roboter legt das Kalibrierteil auf Position der gewünschten Position ab
-
Kalibrierteil wird mit Kamera erkannt
-
Koordinaten werden ausgegeben
Hinweis: Auf Kameraseite wird kein Vergleich der Soll-/Ist-Koordinaten durchgeführt.