Smart Robot Calibration
Führt die Kalibrierung zwischen Kamera und Roboter automatisch aus.
-
Verwalten der Koordinaten Paare von Kamera und Roboter
-
Automatische Kalibrierung mit mindestens 4 Koordinaten Paaren
-
Ausgabe des Kalibrierfehler (RMS)
-
Speichern der Kalibrierung für alle Programme
Funktionsprinzip
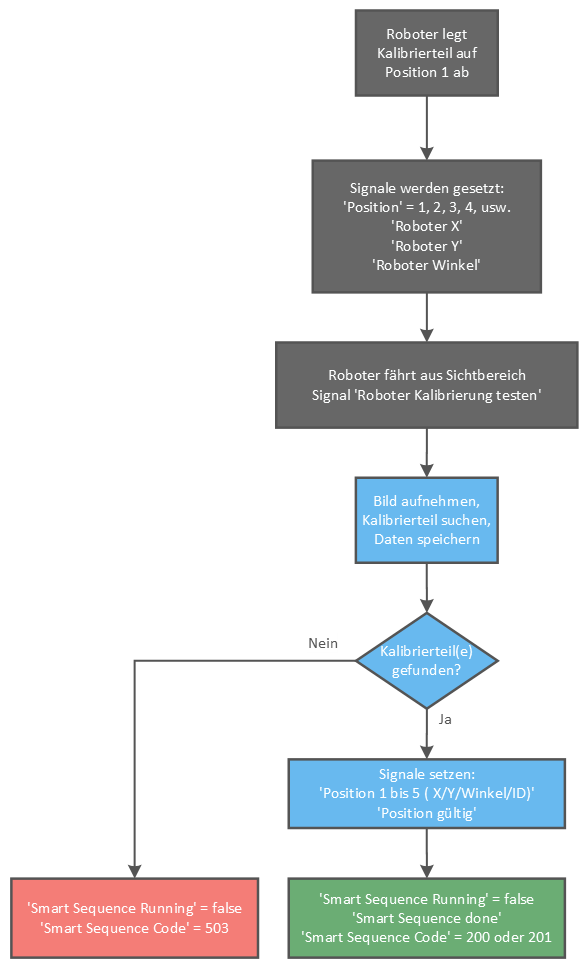
Diese Sequenz besteht aus mehreren Schritten:
-
Roboter legt das Kalibrierteil auf Position der gewünschten Position ab
-
Kalibrierteil wird mit Kamera erkannt
-
Roboter (X/Y) und Kamera (X/Y) Koordinaten werden für die angewählte Position gespeichert
-
Bei Position 1 werden die alten gespeicherten Koordinaten Paare zurückgesetzt
-
Wenn mindesten 4 Koordinaten Paare vorhanden sind, wir die Kalibrierung automatisch durchgeführt
-
Kalibrierfehler (RMS) und Kalibrierung IO/NIO wird auf der Schnittstelle ausgegeben
-
Hinweis: Für die Kalibrierung wird der Winkel nicht verwendet. Das Kalibrierteil sollte daher immer in der eingelernten Winkellage abgelegt werden.
Hinweis: Jede Koordinate muss in der Einheit Millimeter (mm) übergeben werden. Bei Position 1 werden alle gespeicherten Punkte-Paare gelöscht. Ab 4 Positionen wird die Kalibrierung durchgeführt und der Rms Fehler ausgegeben.