System Einstellungen
Die Systemeinstellungen beinhalten alle relevanten Parameter für die Kommunikation mit den Geräten.
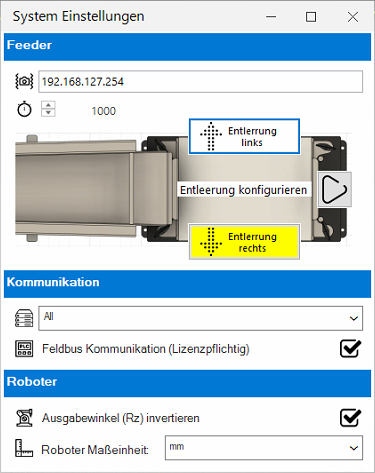
| Feeder | ||

|
IP Adresse des Asycubes | IP Adresse des verbundenen Asycubes |

|
Verbindungstimeout | Verbindungstimeout für die Kommunikation zwischen Software und Asycube in Millisekunden (ms). Dieses Timeout wird für jeden Befehl verwendet. |

|
Asycube Simulation aktivieren | Überbrückt die Ansteuerung des Asycubes für Inbetriebnahmezwecke. Die Ansteuerung des Asycubes wird dabei komplett deaktiviert. |
| Entleerung konfigurieren | Aktiviert/Deaktiviert die Entleerung (Purge). Die Ausrichtung der Entleerung ist für den korrekten Transport der Bauteile wichtig! | |
| Kommunikation | ||

|
IP Adresse für die TCP/IP Kommunikation | IP Adresse für die Verbindung von SPS oder Roboter zu EasySightPro®. Mit der Option All, kann die Verbindung über alle vorhandenen Netzwerk-Ports aufgebaut werden. |

|
Feldbus Kommunikation | Ermöglicht die Kommunikation mittels Feldbus-Modul (lizenzpflichtig) |
| Roboter | ||

|
Ausgabewinkel (Rz) invertieren | Je nach Robotermontage und Ausrichtung des Koordinatensystems, kann der Drehwinkel Rz invertiert werden. |

|
Roboter Maßeinheit | Ausgabeformat der erkannten Positionen in Millimeter oder Meter |