Ablaufprinzip:
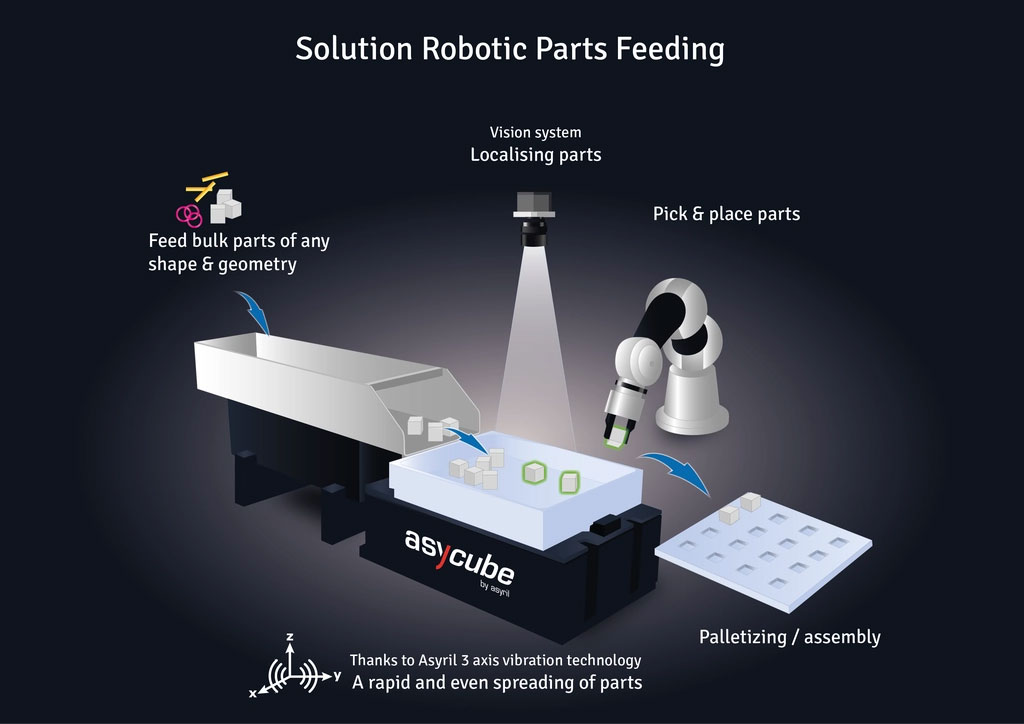
- Schüttgut aus einem Behältnis auf den Feeder zuführen
- Teile vereinzeln: Separierung über gezielte Vibrationen in drei Achsen
- Lokalisierung greifbarer Teile mittels Kamerasystem
- Positionsübergabe inkl. Lage und Orientierung an Roboter / Achssystem
- Teile können aufgegriffen und zugeführt werden

EYE +
Das neue Smart-Kontroll-System, das den Asycube, den Bunker, die Vision und den Roboter steuert
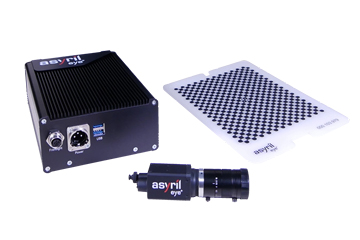 Das EYE+ System ermöglicht die Steuerung aller Komponenten, die für eine moderne und flexible Montagelinie erforderlich sind. Mit EYE+ können Asycube-Anwender die Leistung ihres Systems ohne jegliche Vorkenntnisse in der industriellen Bildverarbeitung und zu einem äußerst wettbewerbsfähigen Preis optimieren. EYE+ ermöglicht auch die Bildverarbeitungskonfiguration und die Hand-Augen-Kalibrierung. Dieses Kontroll-System ist leicht zu integrieren und einfach zu bedienen.
Das EYE+ System ermöglicht die Steuerung aller Komponenten, die für eine moderne und flexible Montagelinie erforderlich sind. Mit EYE+ können Asycube-Anwender die Leistung ihres Systems ohne jegliche Vorkenntnisse in der industriellen Bildverarbeitung und zu einem äußerst wettbewerbsfähigen Preis optimieren. EYE+ ermöglicht auch die Bildverarbeitungskonfiguration und die Hand-Augen-Kalibrierung. Dieses Kontroll-System ist leicht zu integrieren und einfach zu bedienen. 

 JETZT INFORMIEREN
JETZT INFORMIERENEine Sondervariante unserer Controller-basierten Vision Systeme stellen sogenannte Systeme zum „Griff in die Kiste“ bzw. „Bin Picking“ dar. Bei diesen Systemen handelt es sich um Komplettlösungen welche das Greifen von unsortierten Teilen in Kisten bzw. Behältern mittels Robotersystemen ermöglichen.
Hier stellt die eigentliche (3D) Bildaufnahme und -auswertung lediglich einen Teil des Umfangs bzw. der Aufgabenstellung dar. Darüber hinaus spielt dort die Roboter-Bahnplanung, Ansteuerung, sowie die Berücksichtigung der Kulisse (z.B. Arbeitszelle).
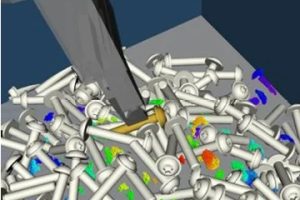
Ablaufprinzip:
- 3D Bildaufnahme und 3D Kontur-Matching
- Vollständige Ablauf- und Robotersteuerung
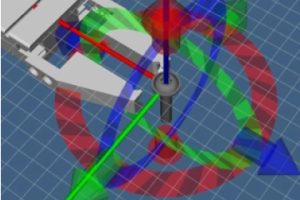
- Bahnplanung inkl. Kollisionsprüfung (inkl. aller Glieder des Roboters, Greifer, Bauteil und Szene)
- Teile mittels Roboter aufgreifen und zuführen
- Vollständige Simulation des Roboters inkl. seiner Umgebung
Gerade die beiden letztgenannten Punkte der Bahnplanung inkl. Kollisionsprüfung soweie eine integrierte Simulation stellen keine Selbstverständlichkeit dar, sondern sind praktisch einzigartig. Viele Lösungen können diese beiden – äußerst wichtigen – Themenfelder nicht berücksichtigen aber genau darin liegt meist der Unterschied zw. Funktion und nicht Funktion.
Im Bereich von „Griff in die Kiste“-Systemen setzen wir folgende Hauptkomponenten ein:
- Ensenso Stereo 3D Systeme („3D Snapshot Sensoren“)
- MIKADO Software als Herzstück (3D Bildverarbeitung, Bahnplanung, etc.)
- Unterstützung aller namhaften Roboter Hersteller, wie
- ABB, Fanuc, Kuka, Mitsubhishi, Omron, Stäubli, Universal Robots