Smart Part Detection
Fordert ein oder mehrere Teile vollautomatisch an und gibt die Koordinaten der gefundenen Kandidaten aus.
-
Verwalten des integrierten Teile Buffers mit automatische Ablöschen in Abhängigkeit von Parameter image_after_send.
-
Durchlauf bis die gewünschte Anzahl an Teilen gefunden wurde. Gesteuert über Parameter part_quantity.
-
Automatisches Zuführen der Teile anhand der momentanen Belegung
-
Bewegen der Bauteile nach vorgegebener Sequenz
-
Automatische Erkennung der Bauteile mittels Kamera
-
Abbruch bei Erreichung der Erkennungszeit timeout
-
-
Ausgabe der Positionen über die aktuelle angeforderte Schnittstelle
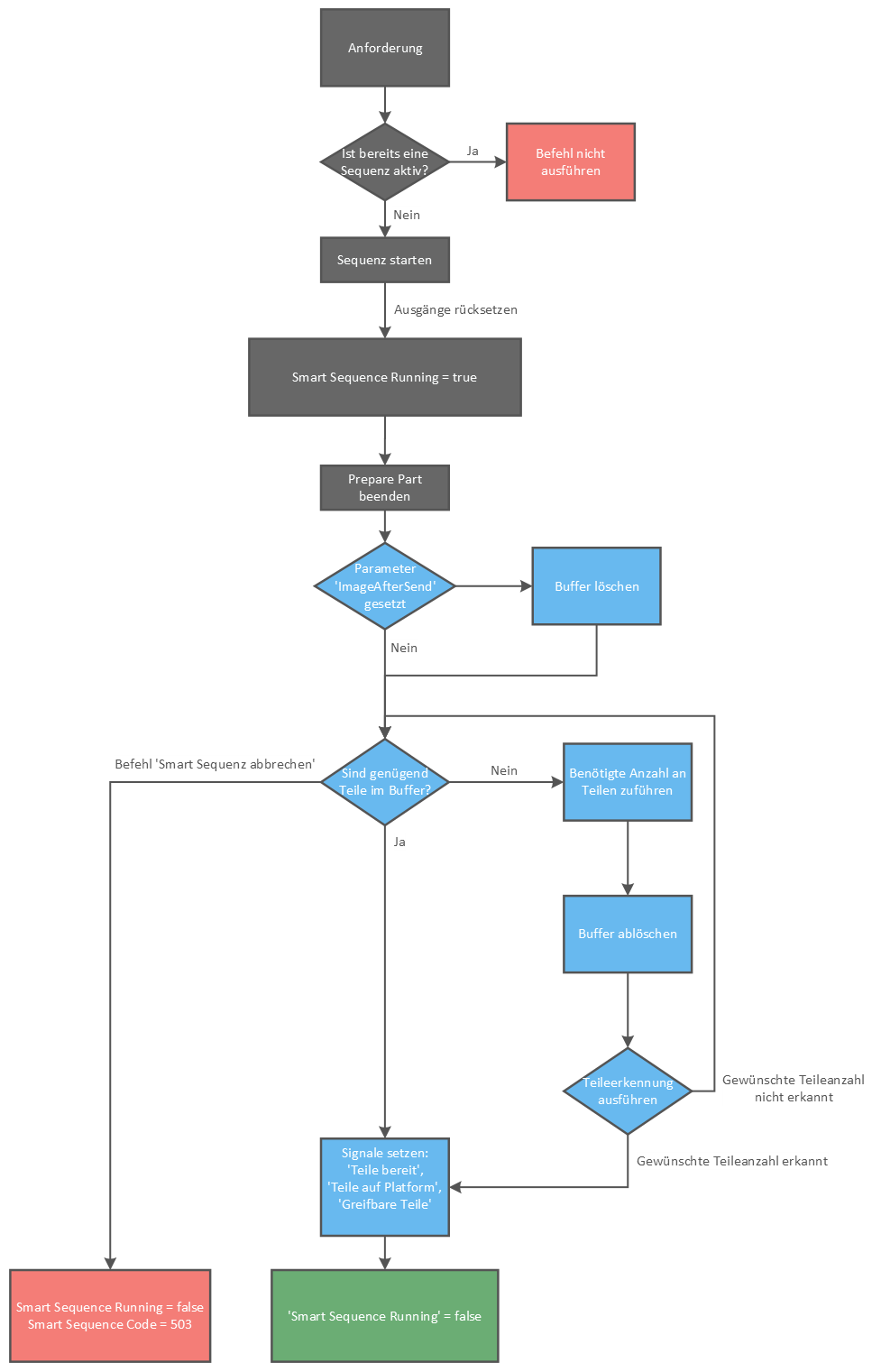
Funktionsprinzip
Diese Sequenz kann auf verschiedene Arten ausgeführt werden:
-
Erste Befehlsausführung: Handelt es sich um die erste Befehlsausführung der gesamten Produktion oder ist der Teile Buffer leer:
-
Wenn der Befehl ausgeführt wird, wird ein Bild aufgenommen und analysiert. Wenn kein gutes Teil gefunden wird, wird die Vibrationssequenz gestartet, gefolgt von einer Bildanalyse. Diese beiden Aktionen werden wiederholt, bis mindestens ein gutes Teil gefunden wird.
-
Wenn mindestens die geforderte Anzahl an Kandidaten gefunden wird, werden die Koordinaten aller gefundenen Teile in einer Liste (Buffer) gespeichert. Dann wird die Anzahl an geforderten Teile über die Schnittstelle ausgegeben.
-
-
Normaler Betrieb: Wenn die Buffer mindesten die Anzahl an geforderten Teilen enthält, dann werden die Koordinaten direkt über die Schnittstelle ausgegeben.
-
Keine weiteren Teile: Wenn der Buffer keine oder zu wenig Teile enthält, dann
-
Werden neue Teile nach gefördert
-
Die Vibrationssequenz ausgeführt
-
Ein neues Bild aufgenommen und die Erkennung ausgeführt
-
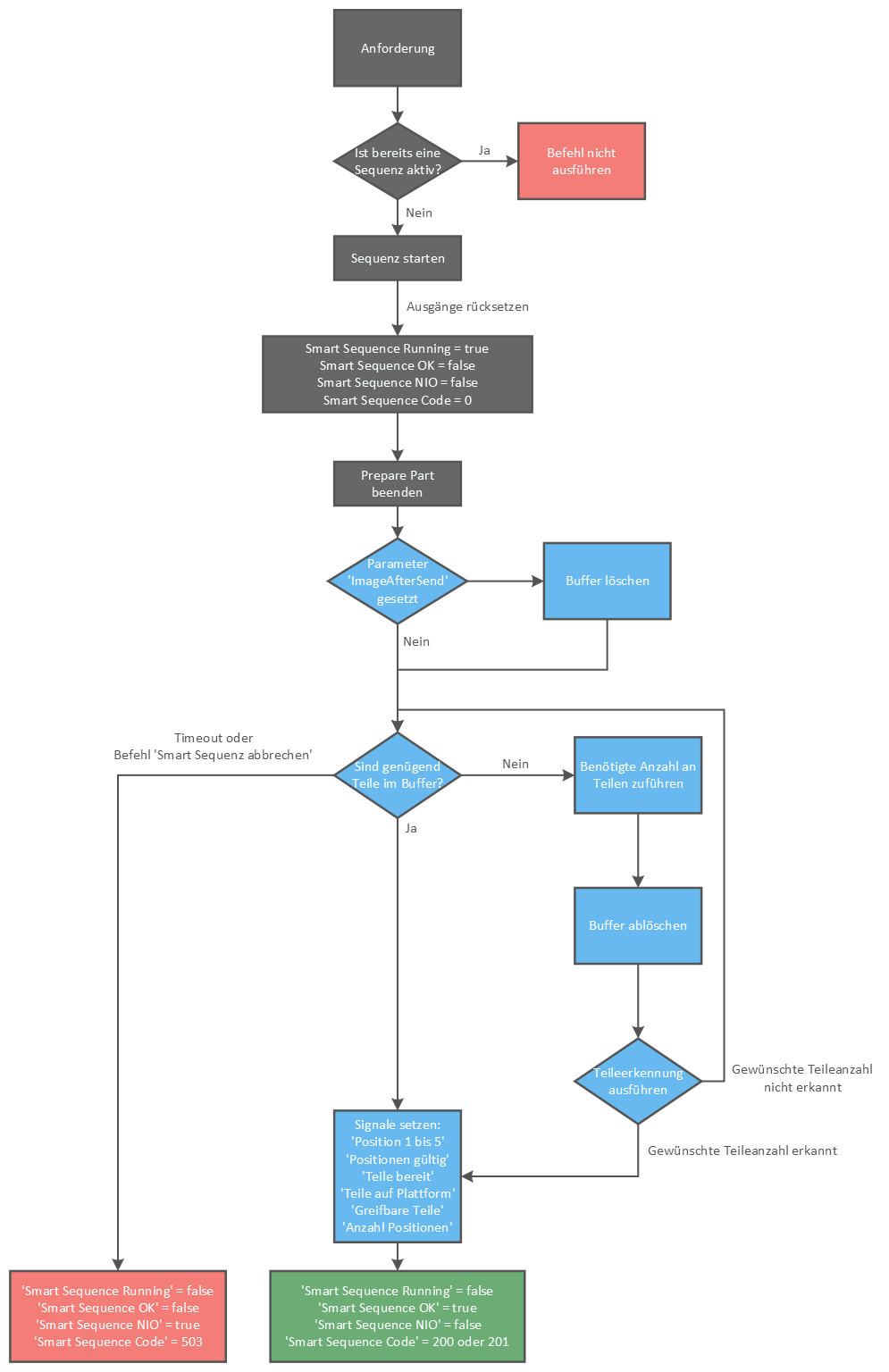
Get Part
Get Part blockiert intern alle anderen Befehle und wird durch die Erkennungszeit in der Laufzeit begrenzt.
Prepare Part
Prepare Part läuft im Hintergrund, blockiert keine anderen Befehle und läuft endlos ohne Timeout weiter. Daher eignet es sich optimal, um Teile für Get Part vorzubereiten.