EtherCAT Slave
Die Anpassung der Kommunikationsparameter erfolgt im Kommunikationsexplorer.
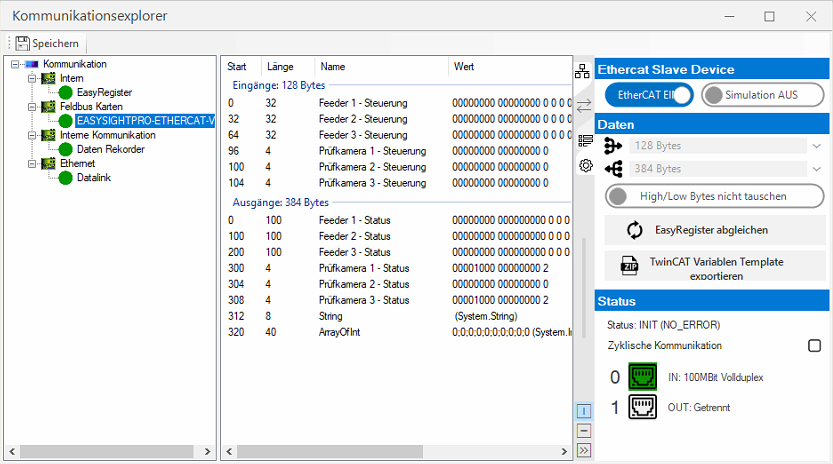
Einstellungen
| Ethercat | Aktiviert/Deaktiviert die Kommunikation. |
| Simulation | Aktiviert/Deaktiviert die Simulation der Karte. Dies ist hilfreich, wenn keine Karte im System verbaut ist. |

|
Es stehen 3 Geräte Konfigurationen mit unterschiedlicher EA-Verteilung zur Verfügung:
|
| High/Low Bytes tauschen | Diese Option ist bei Ethercat per Standard deaktiviert und sollte nur in Sonderfällen geändert werden. |

|
Synchronisiert für alle Register Transfer Module Name und Datentyp in die EasyRegister. |

|
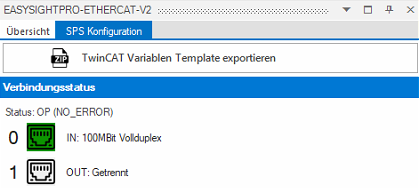
Exportiert die aktuelle Feldbus Konfiguration als TwinCAT Variablen Template. |
| Status | Aktueller Status des EtherCAT Gerätes. |
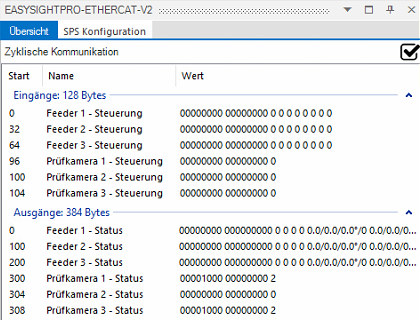
| Zyklische Kommunikation | Zeigt an, ob die zyklische Kommunikation mit der Steuerung aktiv ist. Dies ist der Fall, wenn sich das Gerät im Status OP befindet. |
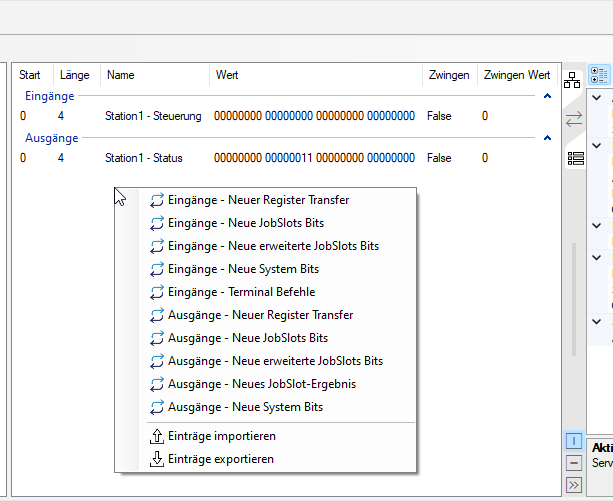
Bedienung
Im mittleren Teil des Kommunikationsexplorer kann man nun durch Rechtsklick einzelne Feldbus Bausteine hinzufügen, oder bereits vorhandene bearbeiten oder löschen.
Zur Überwachung und zum Status-Check gelangen sie über das Menü Administration.
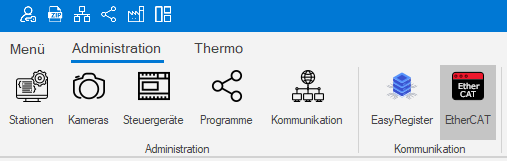
Hier können der Status und die Werte der Ein- und Ausgänge der EtherCAT-Kommunikation überwacht werden.
SPS Integration
Die aktuellste ESI Datei befindet sich
-
am Controller unter: %ESP_ROOT%\Feldbus\EtherCAT\Reliste Vision Controller V1.0.X.xml
-
hier als Download
Wichtig: Die Version im Dateinamen zeigt die ESI-Dateiversion an und kann sich ohne Vorankündigung ändern.
-
Schliessen Sie TwinCAT.
-
Löschen Sie die automatisch von TwinCAT generierte ESI-Datei „OnlineDescriptionCache00000DA6.xml” im ESI-Verzeichnis (z. B. C:\TwinCAT\3.1\Config\Io\EtherCAT)
-
Kopieren Sie die ESI-Datei in das ESI-Verzeichnis (z.B.: C:\TwinCAT\3.1\Config\Io\EtherCAT)
-
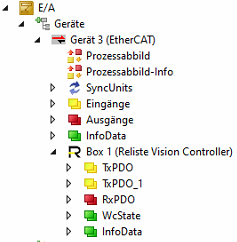
Das Gerät erscheint nach der Suche im TwinCAT System Manager als "Box 1 (Reliste Vision Controller)"
-
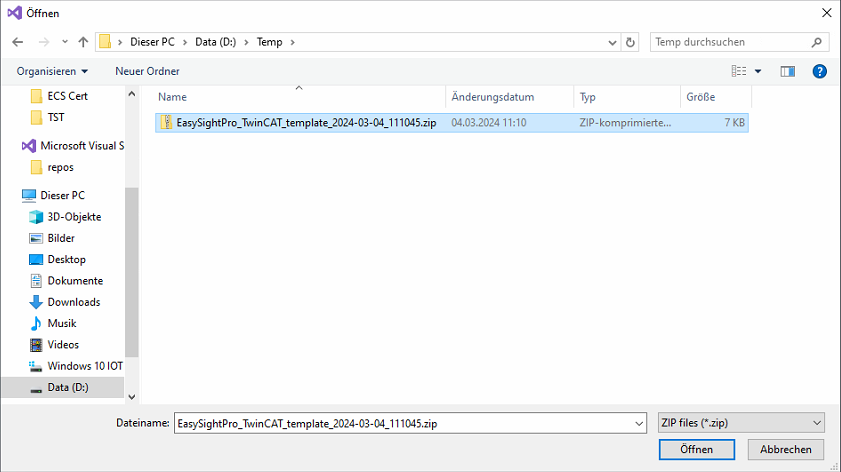
Die Datenstruktur der EasySightPro® Konfiguration kann im Kommunikationsexplorer mittels "TwinCAT Variablen Template exportieren" als ZIP Datei gespeichert werden
-
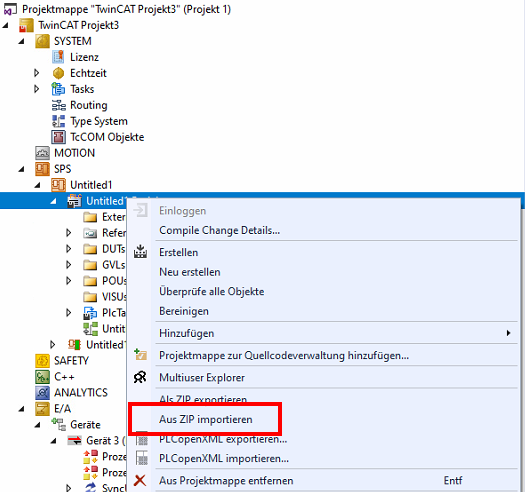
Die generierte ZIP Datei kann in TwinCAT mittels "Aus ZIP importieren" eingelesen werden
-
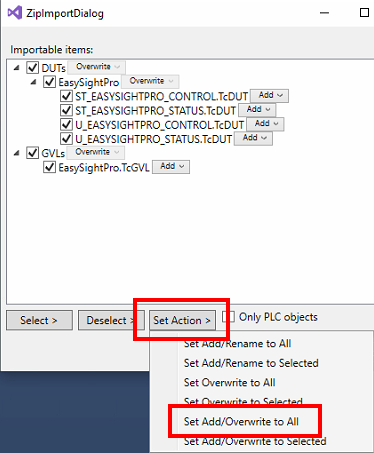
Falls bereits eine importierte EasySightPro® Struktur vorhanden ist, dann sollte der Punkt "Set Add/Overwrite to All" gewählt werden. Import mit "OK" bestätigen
-
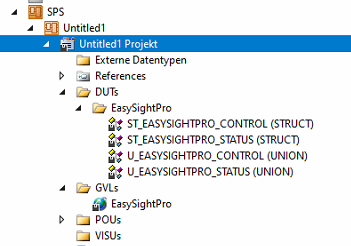
Nach dem Import wird eine Globale Variable EasySightPro (GVLs) und die dazu gehörigen Datenstrukturen unter DUTs\EasySightPro angelegt
-
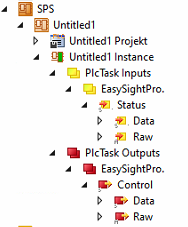
Projekt kompilieren, dadurch werden die Instanzen angelegt
-
Nun müssen die Raw Daten der Datenstruktur mit dem Gerät verbunden werden
-
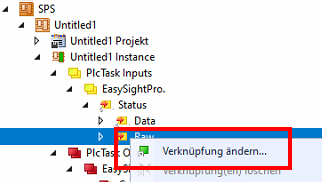
PlcTasks Inputs - EasySightPro. - Status - Raw wählen und mit rechter Maus auf "Verknüpfung ändern" klicken
-
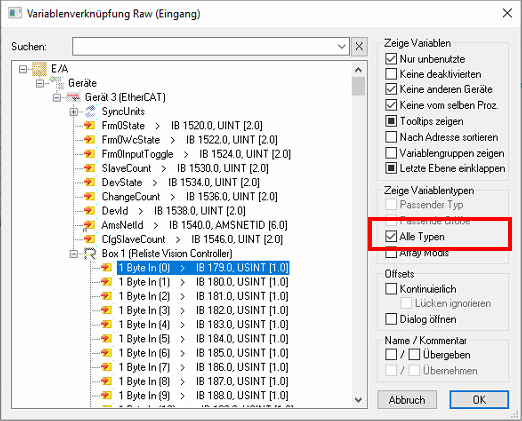
Im Fenster zuerst bei "Zeige Variablentypen" auf "Alle Typen" umschalten. Danach wir der Vision Controller sichtbar
-
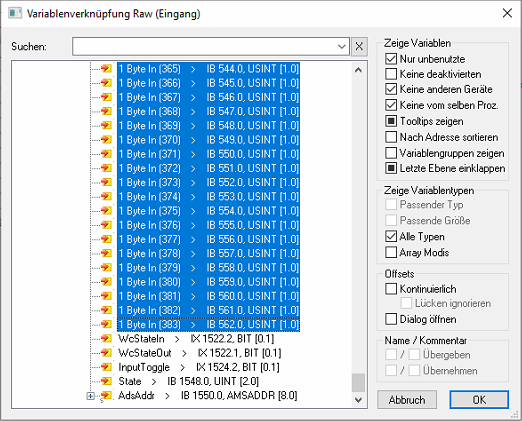
Nun "1 Byte IN[0]" auswählen und mit gedrückter SHIFT Tasten den Datenbereich bis "1 Byte In [383]" auswählen
-
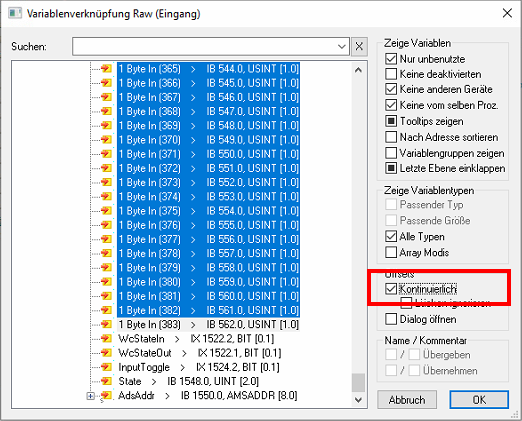
Als letzten Schritt den Offset auf Kontinuierlich stellen und mit OK bestätigen
-
Die Plc Inputs sind nun verbunden
-
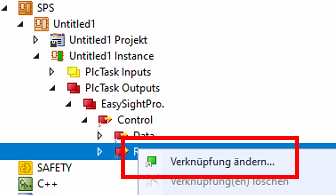
PlcTasks Outputs - EasySightPro. - Status - Raw wählen und mit rechter Maus auf "Verknüpfung ändern" klicken
-
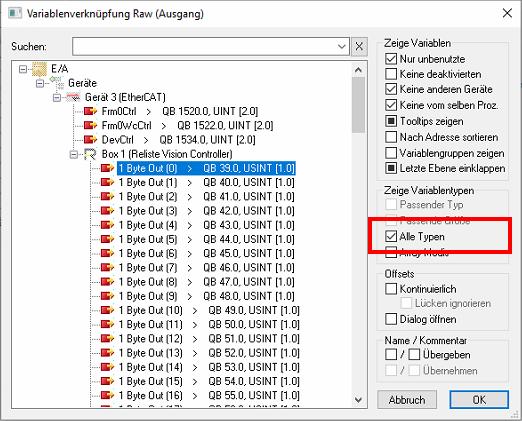
Im Fenster zuerst bei "Zeige Variablentypen" auf "Alle Typen" umschalten. Danach wir der Vision Controller sichtbar
-
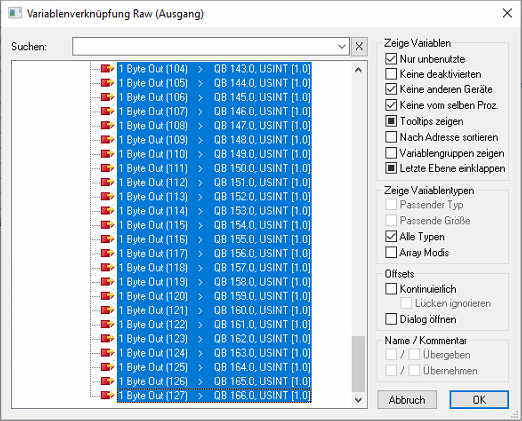
Nun "1 Byte Out[0]" auswählen und mit gedrückter SHIFT Tasten den Datenbereich bis "1 Byte Out [127]" auswählen
-
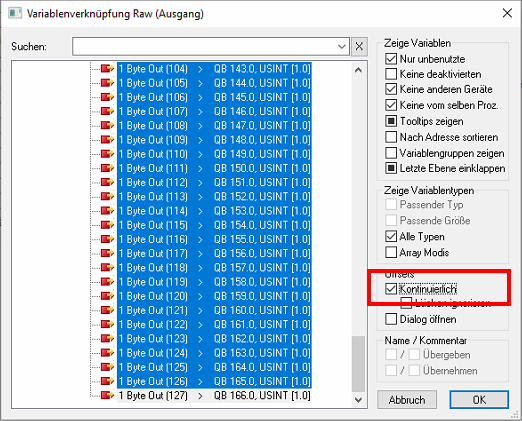
Als letzten Schritt den Offset auf Kontinuierlich stellen und mit OK bestätigen
-
Die Plc Outputs sind nun verbunden
-
Nun kann die Konfiguration aktiviert und TwinCAT in den Run Modus geschalten werden
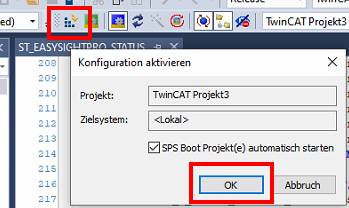
-
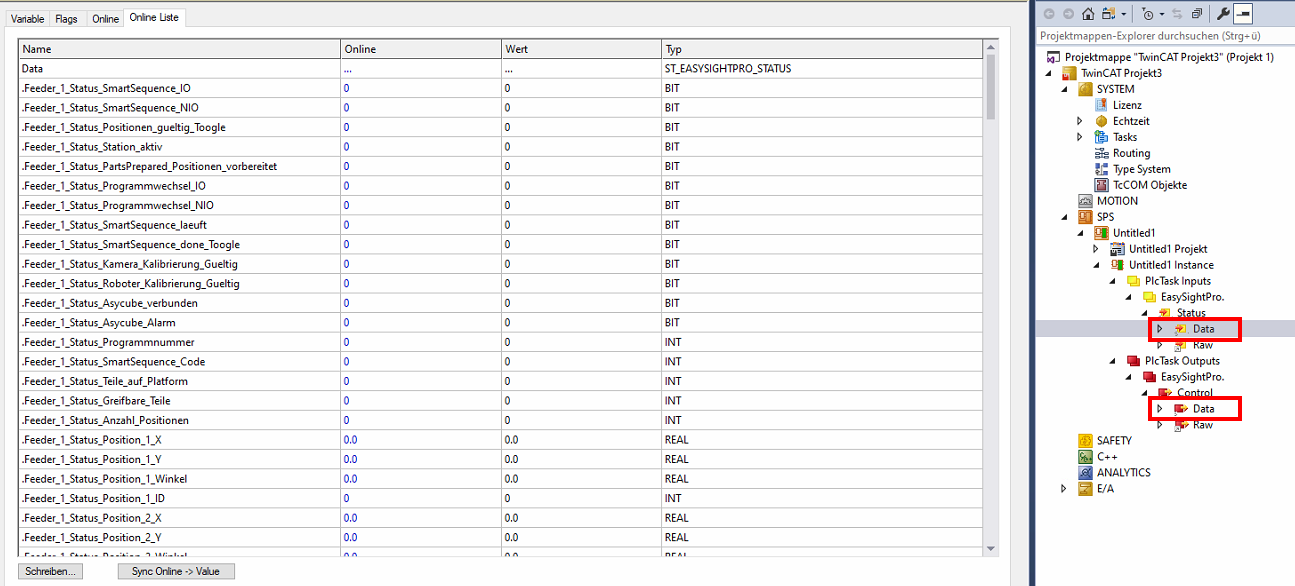
Die Online Daten können über EasySightPro.Status.Data bzw. EasySightPro.Control.Data angesehen werden