TwinCAT Ads
Die Anpassung der Kommunikationsparameter erfolgt im Kommunikationsexplorer.
Wählen sie dazu links die entsprechende Feldbuskarte an, um anschließend im rechten Teil des Kommunikationsexplorers die entsprechenden Einstellungen tätigen zu können.
Hinweis: TwinCAT muss am Controller installiert und konfiguriert werden.

Einstellungen
| TwinCAT Ads | Aktiviert/Deaktiviert die Kommunikation. |
| Simulation | Aktiviert/Deaktiviert die Simulation. Dies ist hilfreich, wenn TwinCAT nicht installiert ist. |

|
AMS-Net-ID des Servers (SPS). Standard für lokalen Zugriff: 127.0.0.1.1.1 |

|
Kommunikationsport laut TwinCAT Ads Konfiguration. |

|
Variablenname mit den Ausgangsdaten der SPS (Kamera-Eingänge). Bei einer aktiven TwinCAT Ads Verbindung, werden in der Auswahl alle Variablen des Typs "ARRAY[0..] OF BYTE" angezeigt. |

|
Größe der Eingangsdaten der Variable in Bytes. |

|
Variablenname mit denEingangssdaten der SPS (Kamera-Ausgänge). Bei einer aktiven TwinCAT Ads Verbindung, werden in der Auswahl alle Variablen des Typs "ARRAY[0..] OF BYTE" angezeigt. |
|
|
Größe derAusgangsgangsdaten der Variable in Bytes. |
| High/Low Bytes tauschen | Diese Option ist per Standard deaktiviert und sollte nur in Sonderfällen geändert werden. |

|
Synchronisiert für alle Register Transfer Module Name und Datentyp in die EasyRegister. |

|
Exportiert die aktuelle Feldbus Konfiguration als TwinCAT Variablen Template. |
| Status | Aktueller Status der Softwareverbindung vom TwinCAT Ads Client. |
| Zyklische Kommunikation | Zeigt an, ob die zyklische Kommunikation mit der Steuerung aktiv ist. Dies ist der Fall, wenn der Zugriff auf die Eingangs- und Ausgangsvariable in der SPS funktioniert. |
| Eingangsvariable verfügbar | Zeigt an, ob der Zugriff auf die Eingangsvariable der SPS funktioniert. Sollte das nicht klappen, dann ist entweder die SPS nicht erreichbar oder der Variablenname falsch konfiguriert. |
| Ausgangsvariable verfügbar | Zeigt an, ob der Zugriff auf die Ausgangsvariable der SPS funktioniert. Sollte das nicht klappen, dann ist entweder die SPS nicht erreichbar oder der Variablenname falsch konfiguriert. |
Bedienung
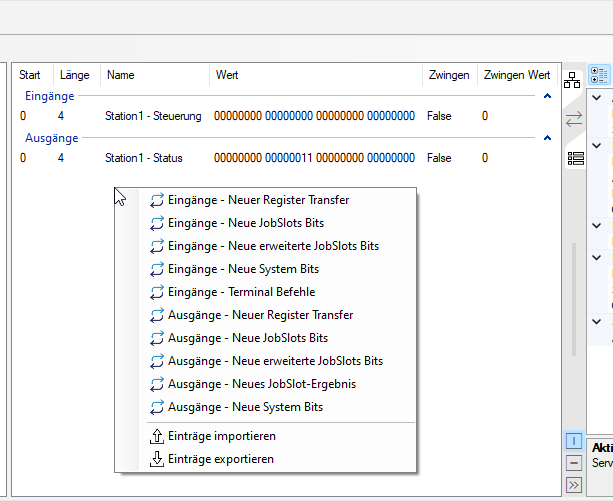
Im mittleren Teil des Kommunikationsexplorer kann man nun durch Rechtsklick einzelne Feldbus Bausteine hinzufügen, oder bereits vorhandene bearbeiten oder löschen.
Zur Überwachung und zum Status-Check gelangen sie über das Menü Administration.

Hier können der Status und die Werte der Ein- und Ausgänge der TwinCAT Ads Kommunikation überwacht werden.

SPS Integration
-
Den Kommunikationsexplorer in EasySightPro öffnen. Administration → Kommunikationsexplorer
-
Das Gerät "Beckhoff TwinCAT Ads" auswählen
-
Im Bereich Kommunikation die AMS-Net-ID und den Kommunikationsport konfigurieren
-
Die Kommunikation speichern und neu starten durch Klick auf "Speichern"

-
Den Kommunikationsexplorer wieder öffnen. Administration → Kommunikationsexplorer
-
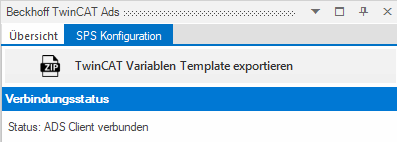
Nun sollte unter Status der ADS Client als verbunden angezeigt werden. Ist das nicht der Fall, dann die Einstellungen bzw. die Konfiguration der Route in TwinCAT kontrollieren
-
Die Variable für die Kamera Eingangs- und Ausgangsdaten kann in der Auswahlliste ausgewählt oder manuell eingegeben werden. Die Auswahlliste ist nur verfügbar, wenn die Kommunikation mit der SPS funktioniert.
Wichtig: Die Variablen müssen in TwinCAT als Array[] of Byte angelegt sein. EasySightPro überträgt und liest in jedem Zyklus das komplette Byte Array.
-
Wenn gewünscht, kann die EasySightPro Datenstruktur in TwinCAT importiert werden, dadurch werden alle Variablen und Signale automatisch angelegt.
-
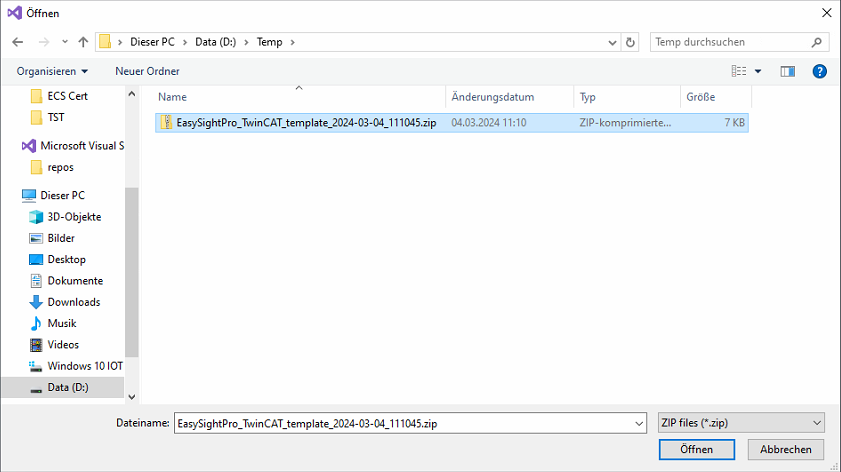
Die Datenstruktur der EasySightPro® Konfiguration kann im Kommunikationsexplorer mittels "TwinCAT Variablen Template exportieren" als ZIP Datei gespeichert werden
-
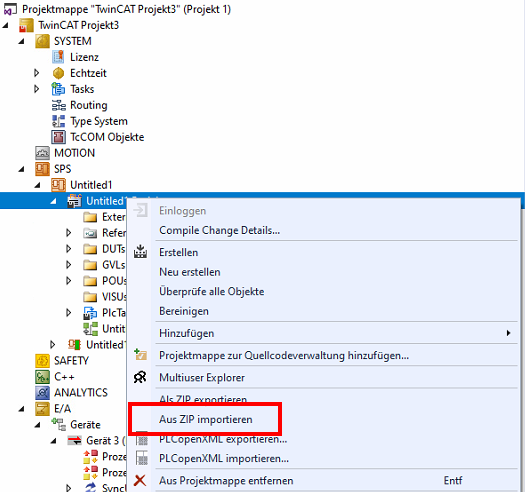
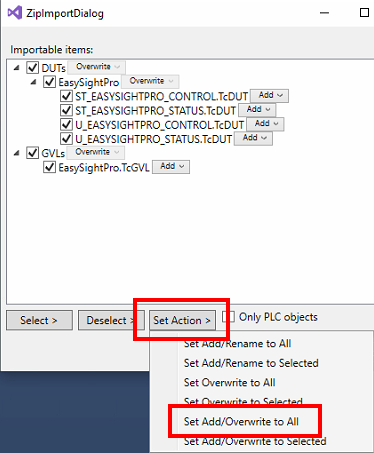
Die generierte ZIP Datei kann in TwinCAT mittels "Aus ZIP importieren" eingelesen werden
-
Falls bereits eine importierte EasySightPro® Struktur vorhanden ist, dann sollte der Punkt "Set Add/Overwrite to All" gewählt werden. Import mit "OK" bestätigen
-
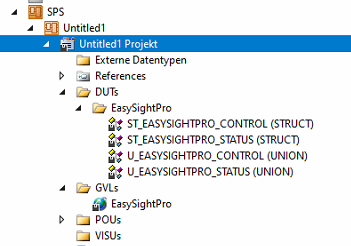
Nach dem Import wird eine Globale Variable EasySightPro (GVLs) und die dazu gehörigen Datenstrukturen unter DUTs\EasySightPro angelegt
-
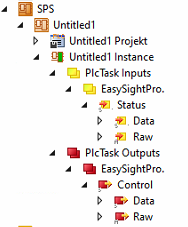
Projekt kompilieren, dadurch werden die Instanzen angelegt
-
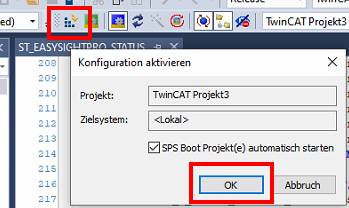
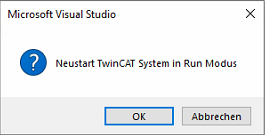
Nun kann die Konfiguration aktiviert und TwinCAT in den Run Modus geschalten werden
-
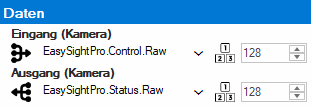
Nachdem die Konfiguration aktiviert ist und die TwinCAT Ads Verbindung neu aufgebaut wurde (Dauer 10-15s), kann die Eingangs- und Ausgangsvariable im Kommunikationsexplorer zugeordnet werden.
-
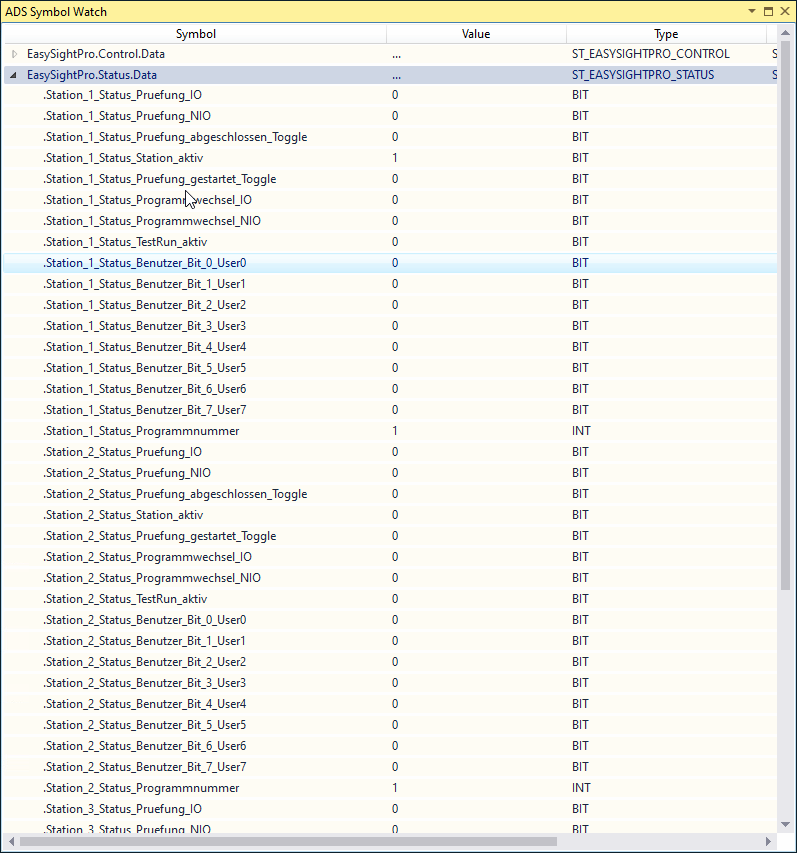
Die Online Daten können über EasySightPro.Status.Data bzw. EasySightPro.Control.Data angesehen werden